NVIDIA Jetpack 6.0에서 RealSense D455f 장치 인식 문제 및 해결
요약
- 문제점: JetPack 6.0이 설치된 NVIDIA Jetson Orin (AGX와 NX 둘 다)에서 Python 및 ROS2 wrapper로 D455f 카메라를 실행하려 했으나 장치를 찾을 수 없다는 에러가 발생함.
- 하지만, realsense-viewer(RealSense2 SDK 도구)에서는 카메라가 인식되고 영상 스트림이 잘 수신됨.
- D435 카메라는 정상적으로 작동하였음 (IMU가 없는 모델).
- 해결 방법: JetPack 버전을 6.0에서 5.1로 다운그레이드한 후 시스템을 다시 플래시함.
- 이후
apt install을 통해 RealSense2 SDK와 ROS2 wrapper를 설치하니 문제없이 D455f 카메라 이미지와 IMU 데이터를 ROS2 토픽으로 확인할 수 있었음.
- 이후
- 결론: 당분간 JetPack 5.1을 사용하고, JetPack 6.0에서 공식적인 IMU 지원이 추가될 때까지 기다리는 것을 추천.
- libuvc backend로 빌드하고 커널 패치를 시도해서 해결해 볼 수도 있겠으나,
- libuvc backend는 개발용으로만 권장되며, 프로덕션 환경에서는 비권장.
- 커널 패치 작업은 보드마다 맞춤형으로 필요하므로 복잡함.
- 특히 현재 사용하는 Jetson NX의 경우 J401 보드를 사용 (Seeed 제품)
- NVIDIA 공식 커널 버전이 아니므로 커널 패치가 작동하지 않을 가능성이 높음.
- 이러한 작업은 시간이 오래 걸리고 유지보수가 어려워, 공식 지원이 나올 때까지 JetPack 5.1을 사용하는 것이 더 효율적임.
- libuvc backend로 빌드하고 커널 패치를 시도해서 해결해 볼 수도 있겠으나,
본 내용
NVIDIA Jetpack 6.0(Jetson Orin Series)에서 RealSense D455f 카메라가 Python 및 ROS2 wrapper에서 인식되지 않는 문제를 발견하였습니다. (문제 발견 시점: 2024-10-14)
해당 문제의 원인, 시도한 해결 방법, 최종 해결책 등을 정리하여 Jetson과 RealSense 통합 작업 시 발생할 수 있는 유사한 문제에 대비할 수 있도록 트러블 슈팅 과정을 기록합니다.
문제 상황
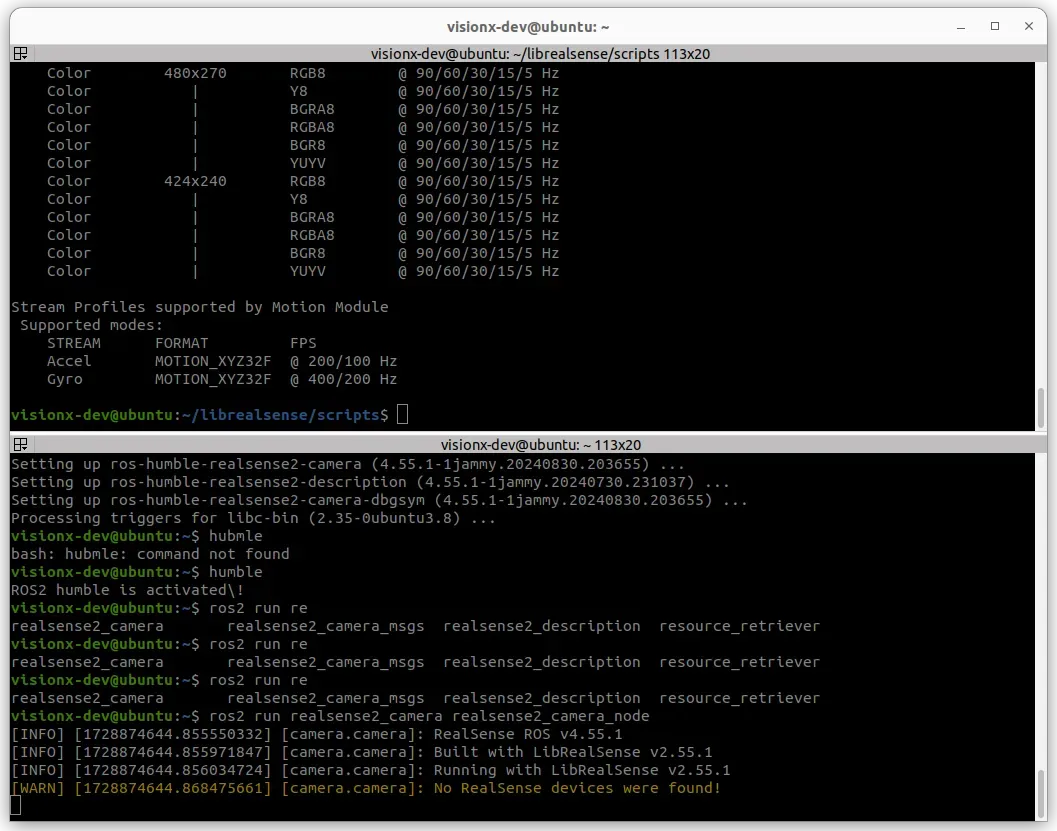
- 문제점: JetPack 6.0이 설치된 NVIDIA Jetson Orin (AGX, NX)에서 Python 및 ROS2 wrapper로 D455f 카메라를 실행하려 했으나 장치를 찾을 수 없다는 에러가 발생함.
- 하지만, realsense-viewer(RealSense2 SDK 도구)에서는 카메라가 인식되고 영상 스트림이 잘 수신됨.
- D435 카메라는 정상적으로 작동하였음.
- 해당 문제 발생 화면
원인 파악
- JetPack 6.0의 리눅스 커널에 D455와 같은 IMU를 포함한 장치(HID 장치)를 위한 드라이버가 기본적으로 지원되지 않음이 문제의 원인으로 파악됨.
- HID 장치 드라이버(예: hidraw)가 JetPack 6.0에 포함되지 않아 D455f 인식에 문제가 발생.
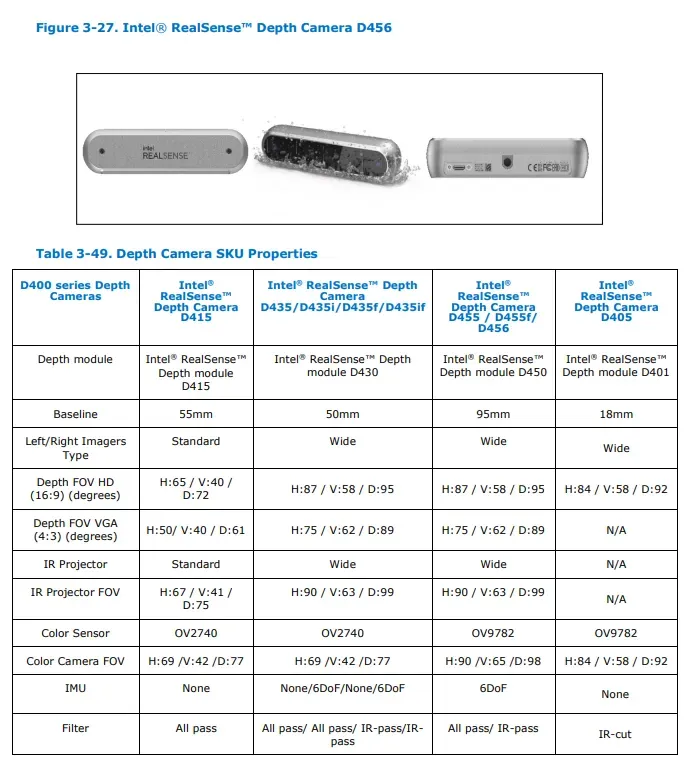
- D455 시리즈의 경우 모든 모델이 IMU가 장착된 것으로 파악 (아래 도표 참고)
- IMU가 없는 D435 모델은 이 문제의 영향을 받지 않음.
해결 방안 및 시도한 방법
시도 1: librealsense SDK를 LibUVC backend로 빌드 시도 (실패)
- libuvc backend를 사용해 커널 의존성을 우회하여 librealsense SDK를 빌드.
아래는 libuvc 설치 가이드
- 결과: 여러 차례 시도했으나 동일한 에러가 발생, 문제 해결 실패.
시도 2: 공식 커널에 MIPI 드라이버 패치 빌드 시도 (실패)
Jetpack 6.0 커널에 realsense에서 제공하는 MIPI 드라이버 패치하여 빌드
realsense_mipi_platform_driver/README_JP6.md at dev · IntelRealSense/realsense_mipi_platform_driver
- 자동 스크립트로 커널 다운로드 시 시간이 지나치게 오래 걸림.
- 1시간에 0.8% 추정의 속도로 진행
- 결과: 수동으로 패치하여 재부팅 후, USB 키보드/마우스 동글이 인식되지 않아 조작 불가 상태가 됨
- Jetson OS를 다시 플래시해야 했음.
시도 3: libuvc backend 빌드 + 커널 패치 (중단)
- 시도 1과 2 동시에 적용하기 위해 재시도.
- 자동 스크립트로 커널을 다운로드하며 기다리는 동안 다른 해결책(시도 4)을 병행.
- 시도 4 방법(JetPack 5.1로 다운그레이드)이 성공하여, 커널 패치 및 libuvc 빌드 시도를 중단함.
시도 4: JetPack 5.1로 다운그레이드 (성공)
- JetPack 5.1로 시스템을 다시 플래시한 후
apt install명령어로 RealSense SDK와 ROS2 wrapper 설치. - JetPack 5.1 플래시는 아래 문서 참고
단, JetPack 5의 경우 Host PC가 Ubuntu 20.04 버전이어야 설치 가능 (Ubuntu 22.04에서 불가).
- 결과:
- D455f 카메라가 Python, ROS2로 정상 인식되고, IMU 데이터도 ROS2 토픽에서 확인 가능.
- 추가적인 패치나 수동 작업 없이도 정상 작동.
결론
JetPack 6.0에서 IMU를 포함한 D455f 카메라를 사용하는 것은 현재로선 쉽지 않습니다. libuvc backend 빌드나 커널 패치로 문제를 해결할 수도 있지만, 이는 복잡하고 안정성이 부족합니다.
무조건 JetPack 6.0을 사용해야하는 상황이 아니라면 현재 JetPack 5.1으로 다운그레이드하는 것이 가장 간단하고 확실한 해결책입니다. 이는 Jetson 환경에서 안정적으로 RealSense 카메라를 사용할 수 있도록 하며, JetPack 6 환경에서 IMU 지원이 공식적으로 추가될 때까지는 이 방법을 권장합니다.
대표 참고 자료
Intel RealSense 커뮤니티 논의:
cannot connect D455 on jetson agx orin
- IMU가 있는 RealSense 카메라는 JetPack 6.0에서 MIPI 드라이버가 필요.
- libuvc backend를 사용하면 커널 의존성을 우회하여 복잡한 커널 패치 작업을 피할 수 있지만, 성능적 및 확장성 측면으로 한계가 있음.
- JetPack 5.1로 다운그레이드하는 것이 일반적인 해결책으로 추천됨.
관련 이슈 모음집
Realsense D455 IMU not working in JP6
Connecting Intelrealsense Depth Camera D455 to Jetson Orin Nano 8GB
D435I not use camera when use IMU
Support for Intel RealSense IMU cameras (e.g. D435i) on Jetpack 6?
cannot connect D455 on jetson agx orin
D435i on Jetson Orin Nano (No devices found) · Issue #3015 · IntelRealSense/realsense-ros
jetson orin AGX issues after upgrading to jetpack 6.0 · Issue #3185 · IntelRealSense/realsense-ros
Jetson 6.0DP and “No Device Detected” in Python only · Issue #12807 · IntelRealSense/librealsense
Jetson Orin with Jetpack 6.0 · Issue #12566 · IntelRealSense/librealsense
Running pyrealsense2 on JetsonNano · Issue #6964 · IntelRealSense/librealsense
Can not get imu data (realsense D455, Jetson nano) · Issue #2212 · IntelRealSense/realsense-ros