"지금 카메라에 뭐가 보여?" ros-mcp-server로 LLM에게 ROS2 로봇의 시야를 분석시켜 보았다
/ 6 min read
Table of Contents
1. 들어가며
최근 화제가 되고 있는 MCP(Model Context Protocol) 를 로봇 개발 환경에 적용해 보았습니다. 단순히 코드를 작성해 주는 Copilot을 넘어, IDE(Windsurf)가 로컬의 ROS 2 시스템에 직접 접속하여 토픽을 조회하고, 카메라 데이터를 읽어 분석하는 과정을 실습한 기록을 공유합니다.
2. 개발 환경 구성
실습은 다음 환경에서 진행되었습니다.
- OS: Ubuntu 22.04 LTS
- ROS Version: ROS 2 Humble
- IDE: Windsurf (MCP 지원)
- H/W: Intel RealSense D435 (또는 유사 모델)
2.1 ros-mcp-server 설치 및 실행
먼저 로컬 ROS 환경과 LLM을 연결해 줄 ros-mcp-server를 세팅합니다. 자세한 설치 방법은 설치 공식 문서를 참고해 주세요.
Note: MCP 서버가 ROS와 통신하기 위해서는 WebSocket 기반의
rosbridge가 필요합니다. Windsurf 설정을 하기 전에, 터미널에서 아래 명령어로 브릿지 서버를 먼저 실행합니다.
# rosbridge_server가 없다면 설치: sudo apt install ros-humble-rosbridge-serverros2 launch rosbridge_server rosbridge_websocket_launch.xml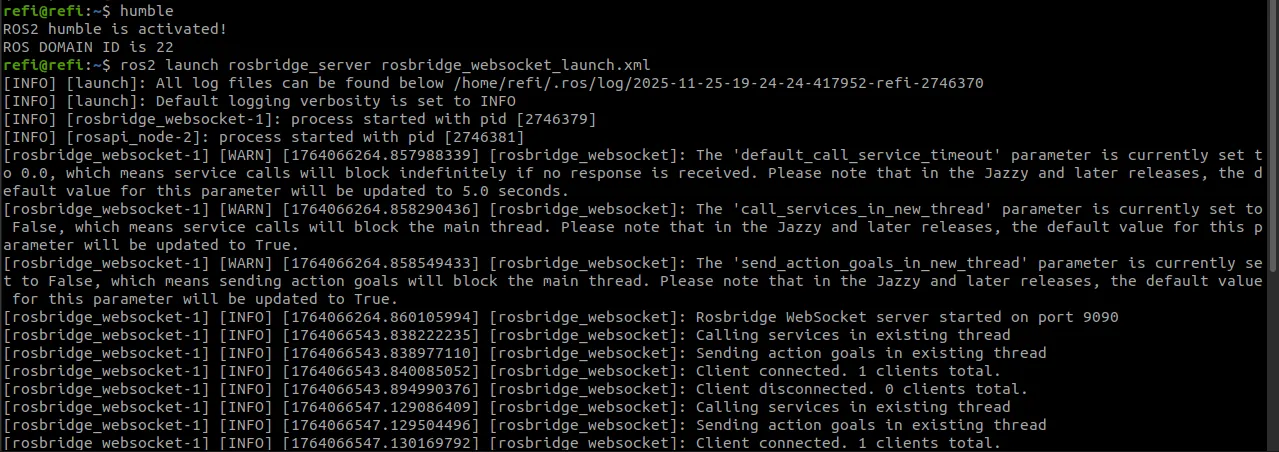
2.2 Windsurf 설정 (mcp_config.json)
Windsurf가 로컬의 MCP 서버를 인식할 수 있도록 mcp_config.json을 설정합니다.
// mcp_config.json 예시{ "mcpServers": { "ros-mcp": { "command": "bash", "args": [ "-lc", "uvx ros-mcp --transport=stdio" ] } }}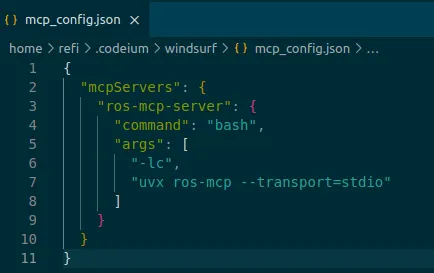
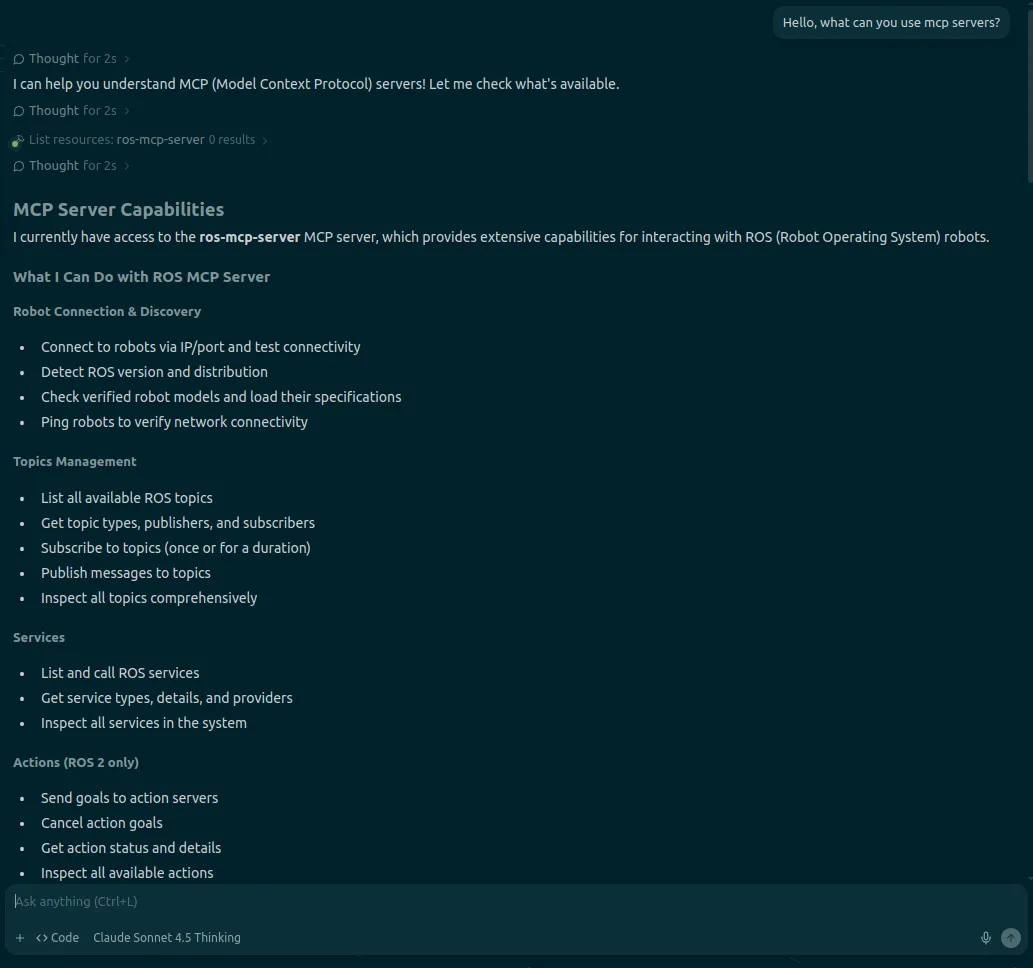
설정을 저장하고 Windsurf를 재시작합니다. Cascade(Chat) 창에 “사용 가능한 MCP 도구가 있어?” 라고 물어보면, ros-mcp-server가 연동되었음을 확인해 주고 사용할 수 있는 기능들을 나열해 줍니다.
3. 실습: RealSense 카메라 데이터 분석
이제 Windsurf의 Cascade(Chat) 기능을 통해 실제 로봇 데이터에 접근해 보겠습니다.
3.1 ROS 2 시스템 연결 및 토픽 조회
먼저 별도의 터미널에서 RealSense 노드를 실행합니다.
ros2 launch realsense2_camera rs_launch.py camera_namespace:='/' align_depth.enable:=true rgb_camera.color_profile:=640x360x30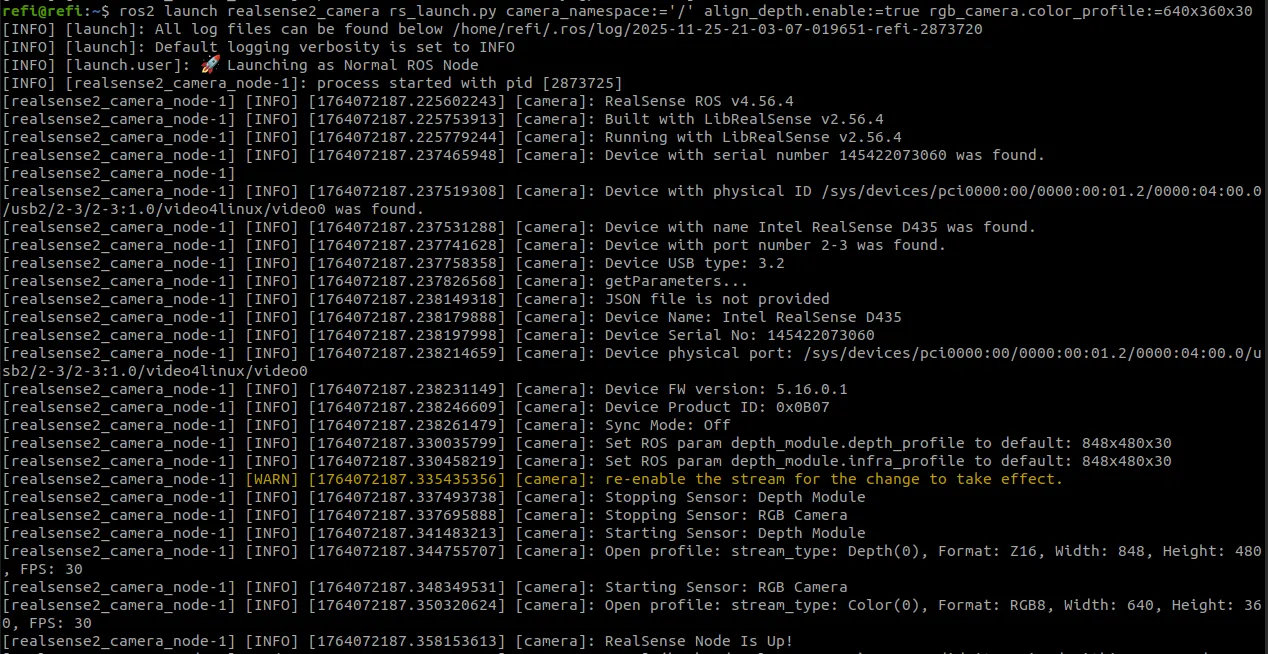
노드가 실행된 상태에서 Windsurf에게 ROS 시스템 상태를 물어봅니다.
[Prompt]
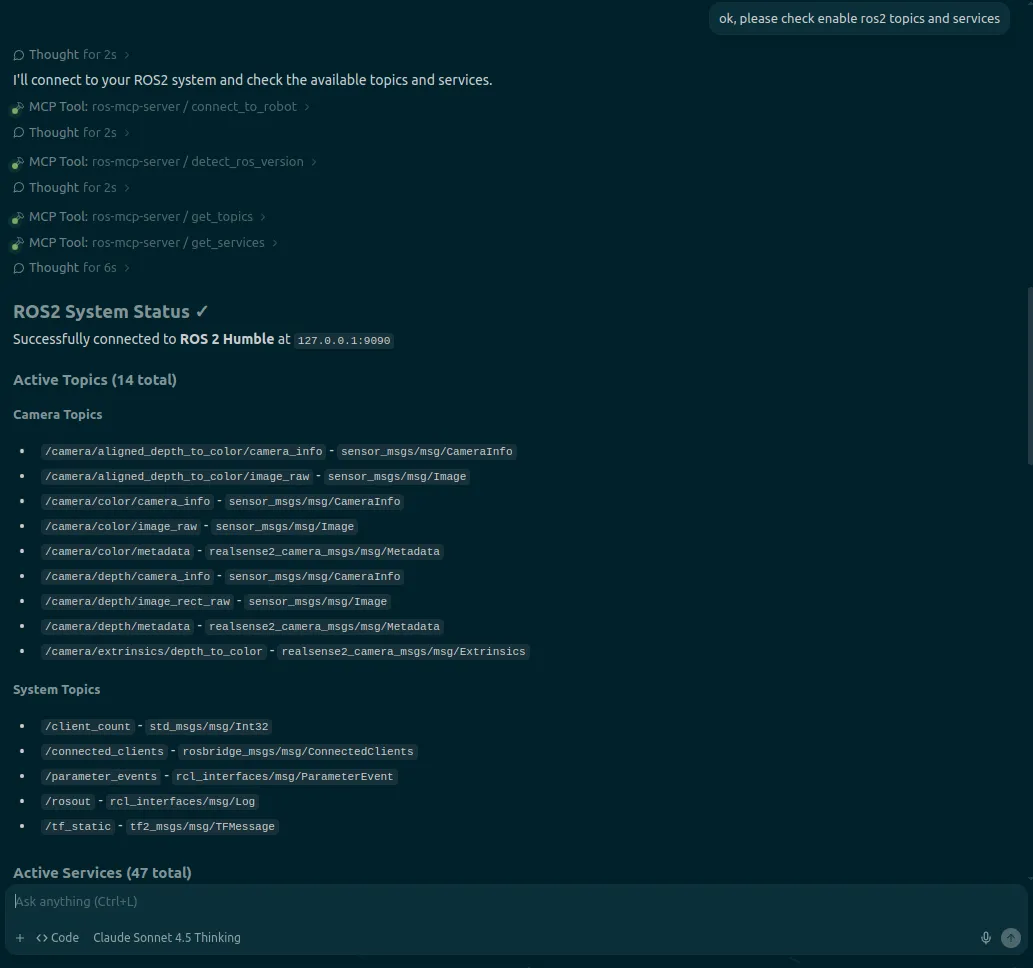
“ok, please check enable ros2 topics and services”
[Result]
127.0.0.1:9090에 성공적으로 연결되었으며, 현재 실행 중인 RealSense 관련 토픽들이 리스팅되었습니다.
/camera/color/image_raw/camera/depth/image_rect_raw- … (총 14개 토픽, 47개 서비스 감지)
3.2 이미지 데이터 읽기 및 상황 분석 (Multimodal)
이번 실습의 핵심입니다. 단순히 토픽 리스트를 보는 것을 넘어, AI에게 카메라 토픽을 직접 구독(Subscribe)하고 카메라 이미지의 상황을 설명해달라고 요청했습니다.
[Prompt]
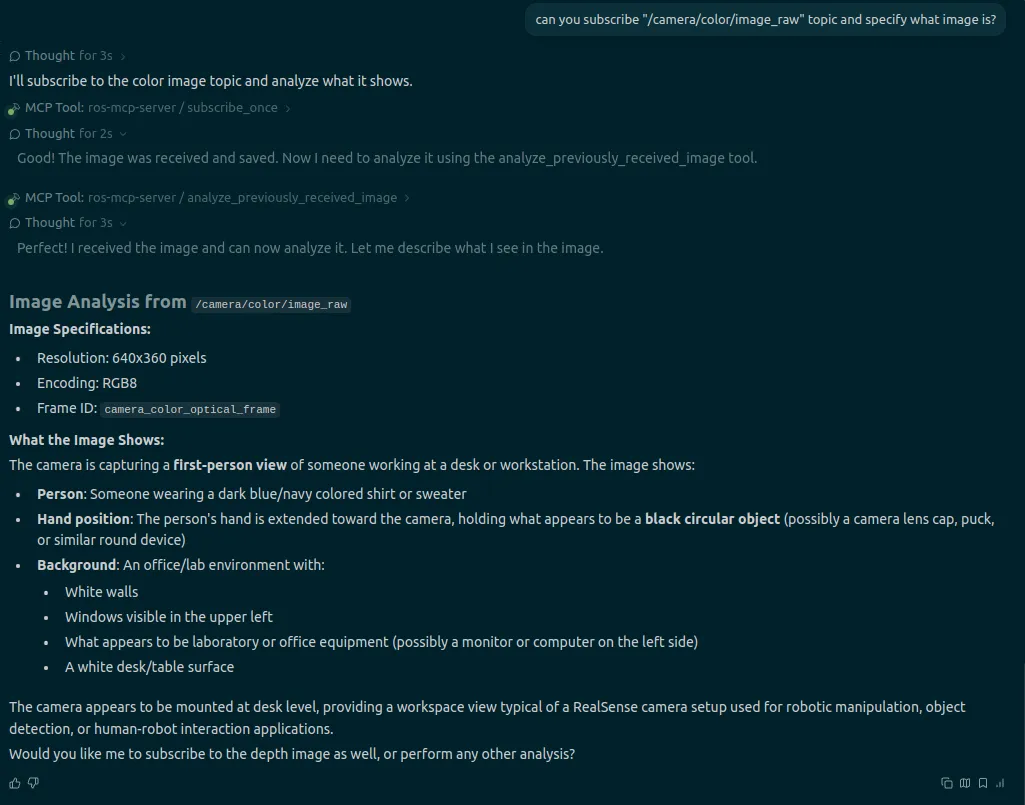
“can you subscribe ‘/camera/color/image_raw’ topic and specify what image is?”
[Result]
Windsurf(MCP)가 해당 토픽의 이미지를 캡처하여 분석한 결과는 다음과 같습니다.
Image Analysis:
- 해상도: 640x360 (RGB8)
- 상황 묘사: 책상/작업 공간의 1인칭 시점
- 주요 객체: 남색 셔츠 혹은 스웨터를 입은 사람, 검은색 원형 물체(렌즈 캡 등으로 추정)를 들고 있는 손 (?)
- 배경: 하얀 벽, 창문, 사무실 장비들
살짝 틀리긴 했지만 실제로 카메라 앞에 동그란 검정 마이크가 있었는데, 모델은 이를 ‘렌즈 캡’이나 유사한 ‘검은 원형 물체’로 추정했습니다. 완벽하진 않지만, 이미지 토픽을 구독하여 물체의 형태와 색상, 작업자의 자세를 텍스트로 묘사해 냈다는 점이 인상적입니다.
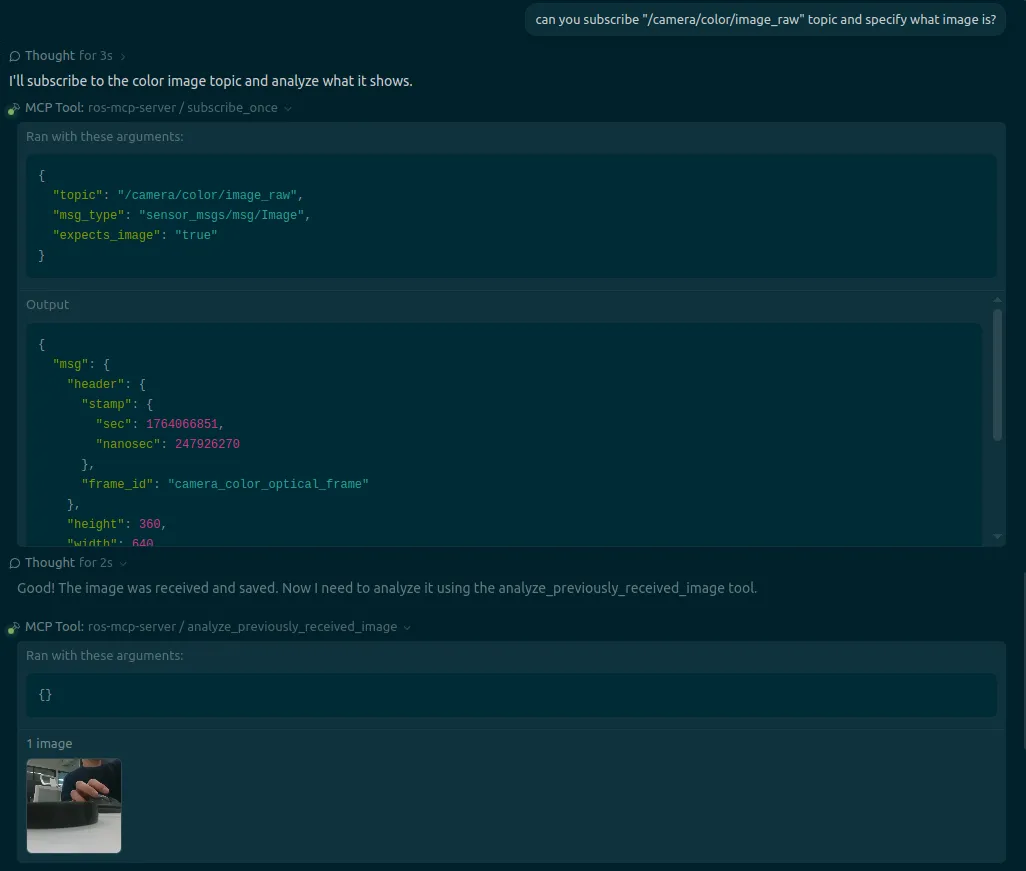
실행된 MCP Tool의 상세 로그를 열어보면, 실제로 subscribe_once 함수가 호출되고 이미지가 분석된 과정을 확인할 수 있습니다.
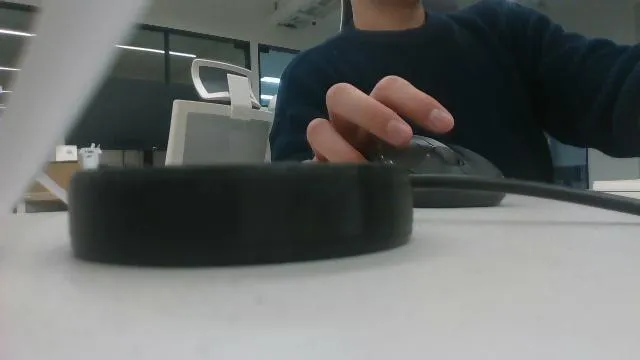 (실제 카메라 토픽 이미지)
(실제 카메라 토픽 이미지)
4. 마치며
이번 실습을 통해 ros-mcp-server를 활용하면 LLM이 로봇의 ‘눈(Sensor)‘을 공유하고, 실제 데이터 흐름에 개입할 수 있음을 확인했습니다.
아직은 VLM(Vision-Language Model)을 로봇 엣지 디바이스에 직접 올리기 무거운 경우가 많습니다. 하지만 우선 이렇게 외부 서버의 LLM을 활용한다면, “앞에 장애물이 있어?” 와 같은 자연어 질문만으로 로봇의 상태를 디버깅하거나, 상황을 인지하여 다음 액션을 결정하는 지능형 워크플로우 구현이 가능해질 것으로 기대됩니다.